 PCB
PCB FPC
FPC Rigid-Flex
Rigid-Flex FR-4
FR-4 HDI PCB
HDI PCB Rogers High-Frequency Board
Rogers High-Frequency Board PTFE Teflon High-Frequency Board
PTFE Teflon High-Frequency Board Aluminum
Aluminum Copper Core
Copper Core PCB Assembly
PCB Assembly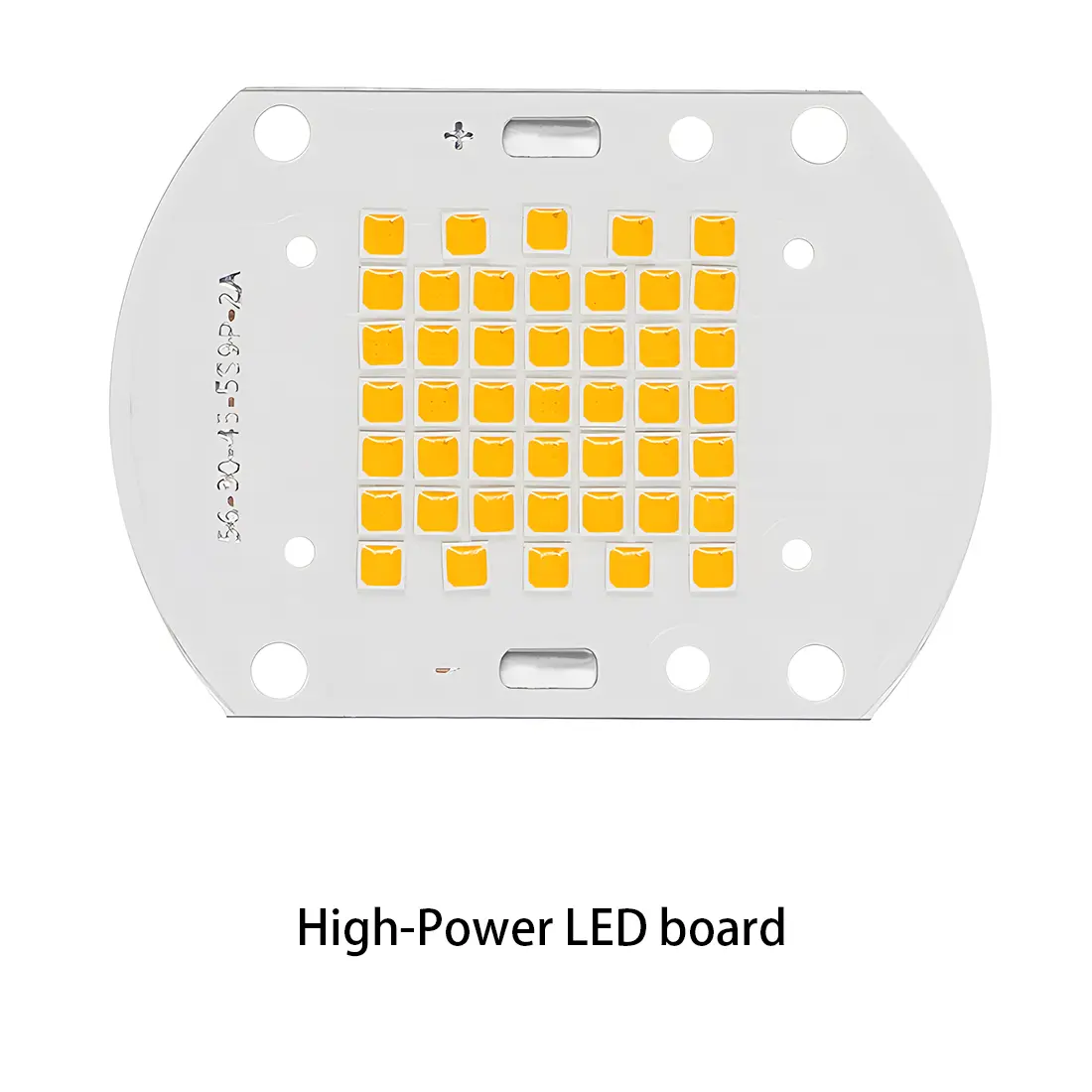 LED light PCBA
LED light PCBA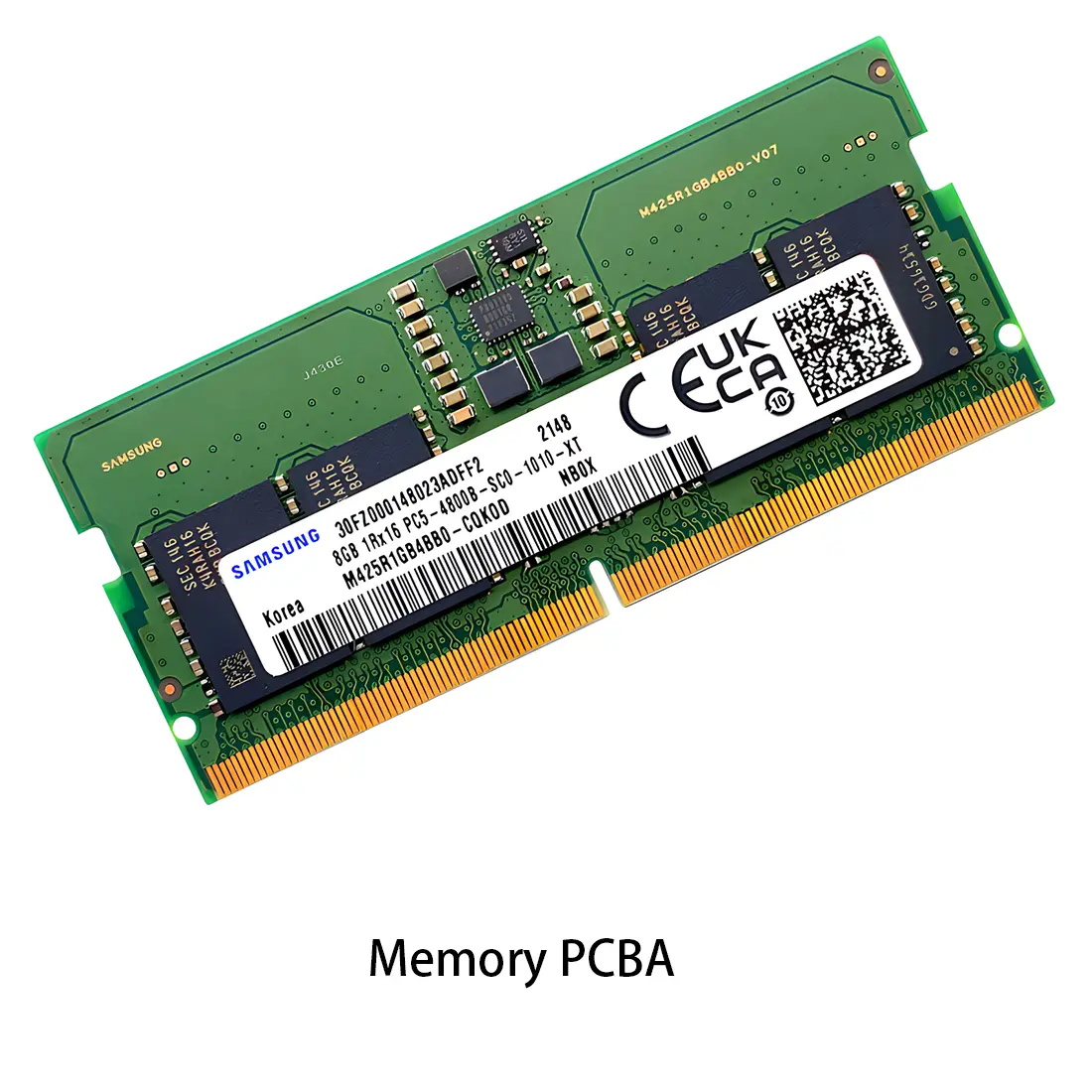 Memory PCBA
Memory PCBA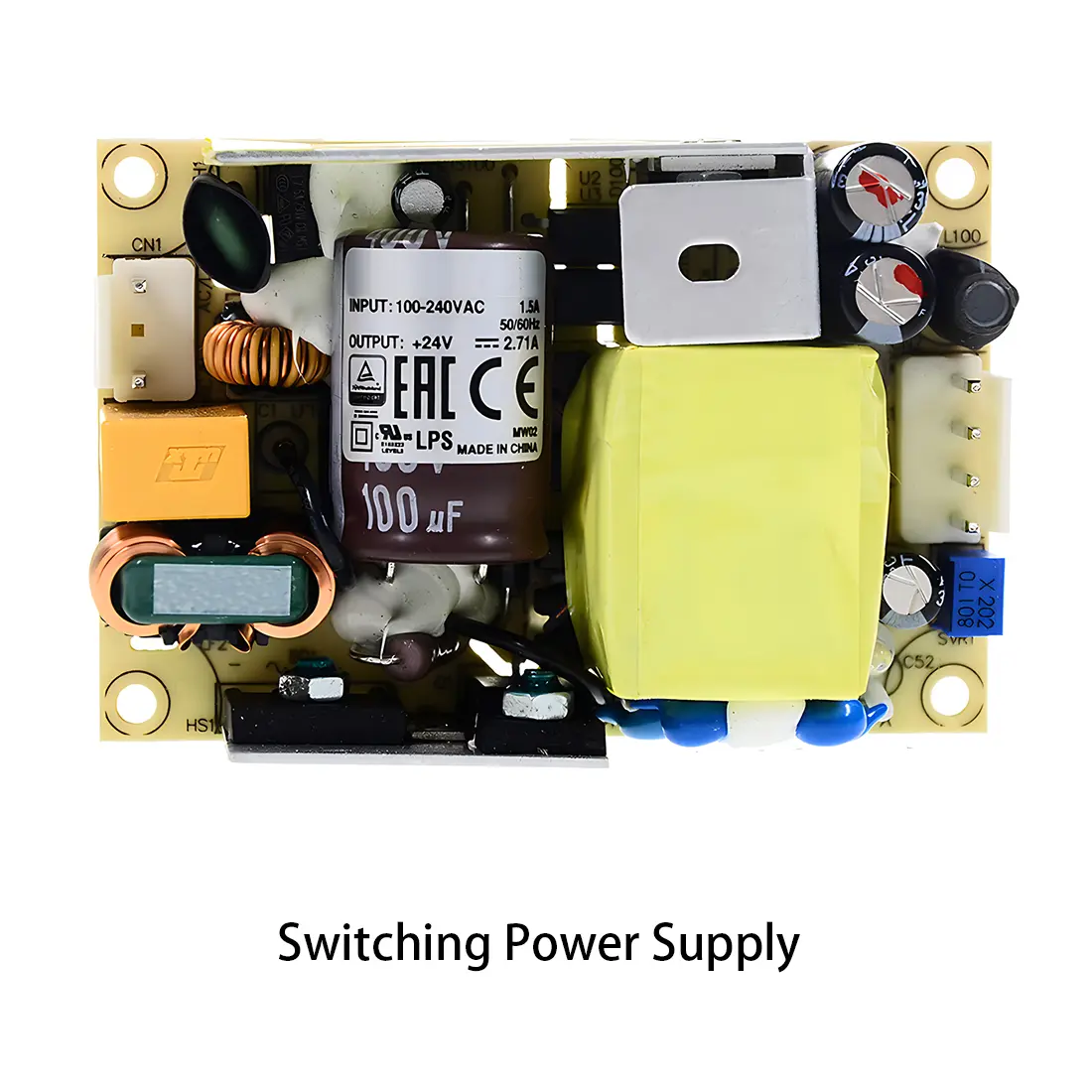 Power Supply PCBA
Power Supply PCBA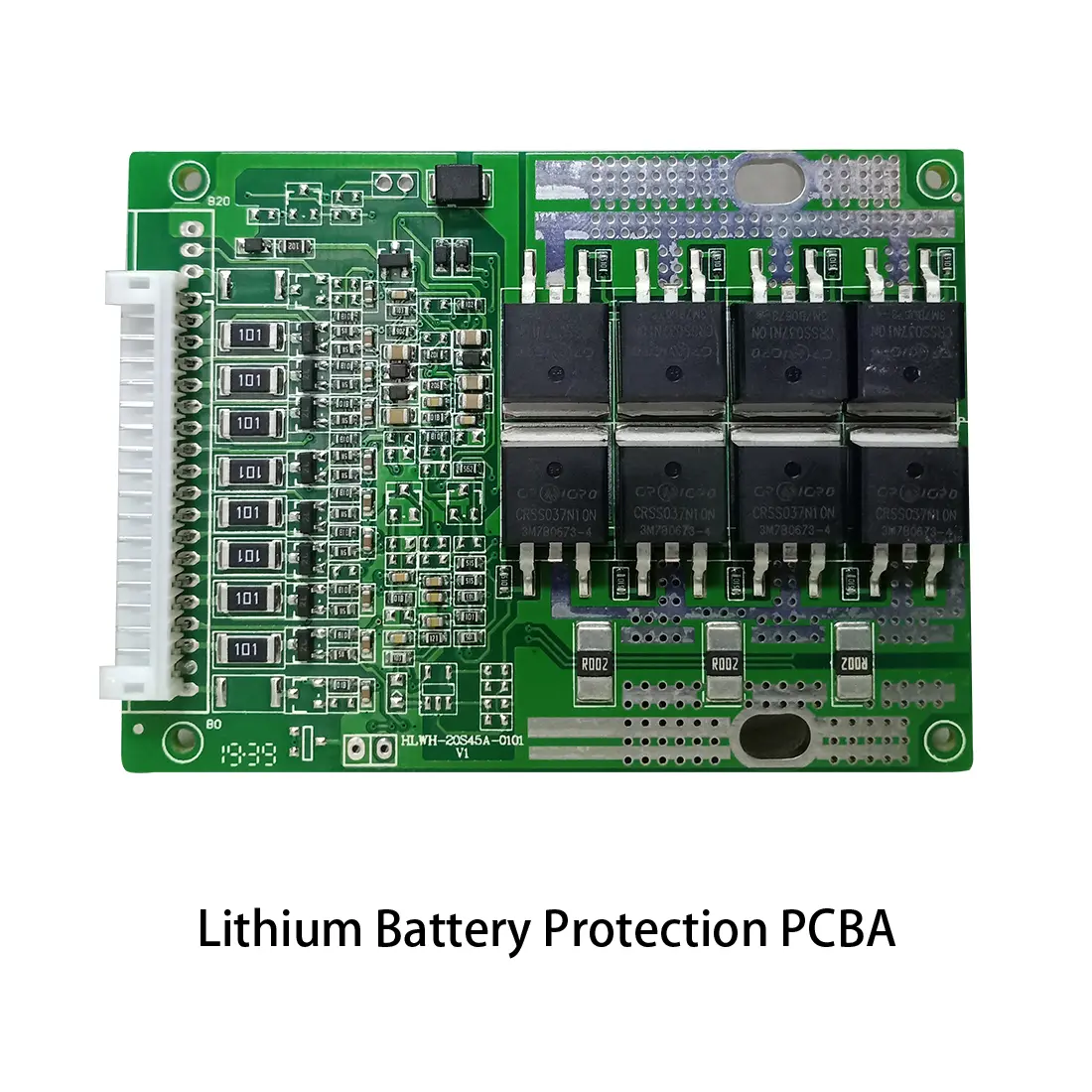 New Energey PCBA
New Energey PCBA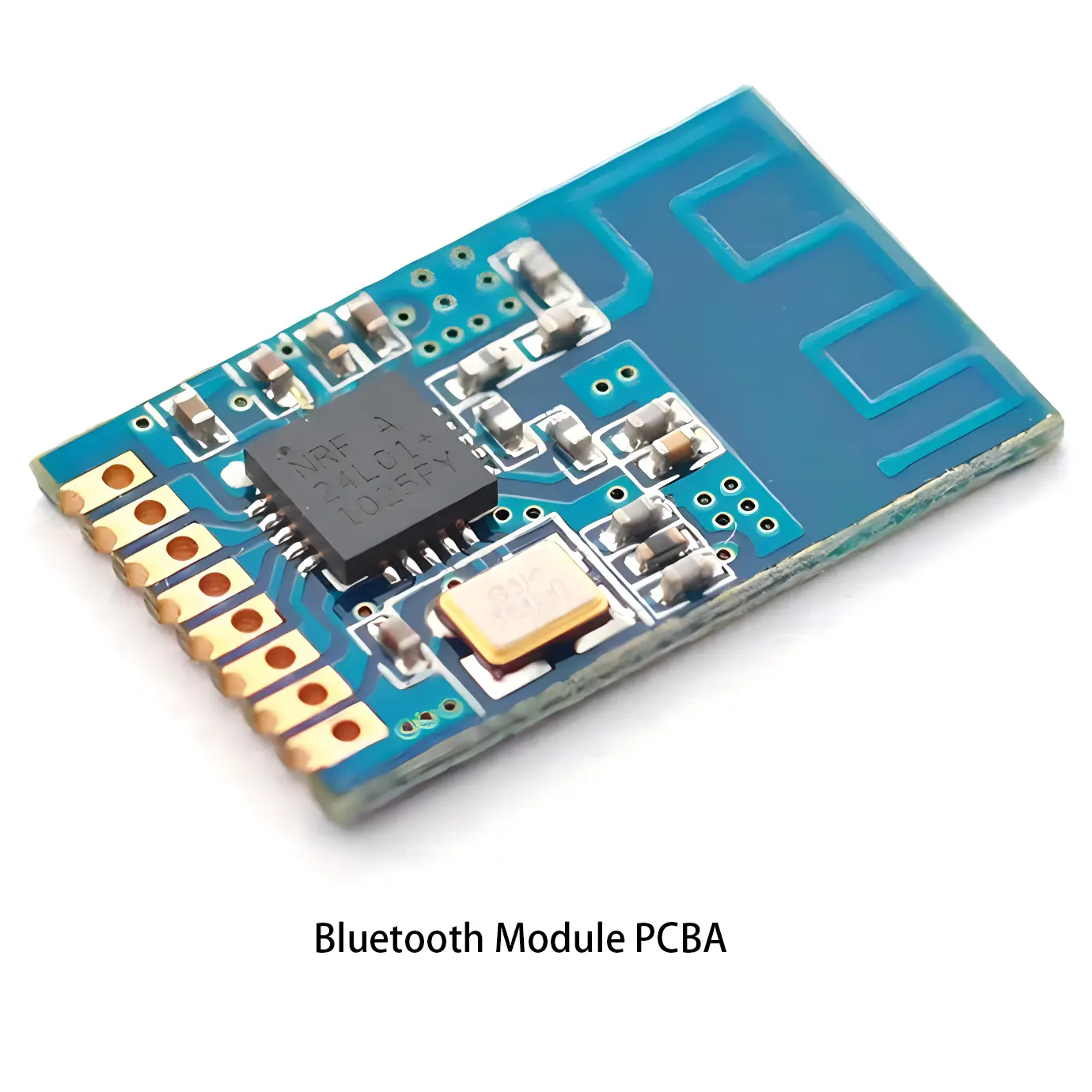 Communication PCBA
Communication PCBA Industrial Control PCBA
Industrial Control PCBA Medical Equipment PCBA
Medical Equipment PCBA Testing Service
Testing Service PCBA Testing Service
PCBA Testing Service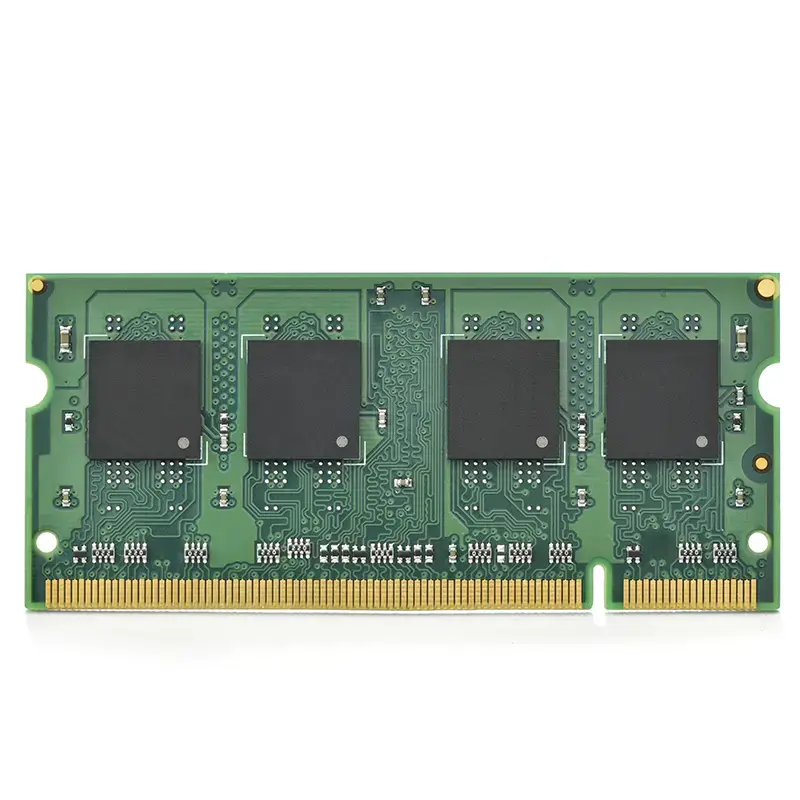 Certification Application
Certification Application RoHS Certification Application
RoHS Certification Application REACH Certification Application
REACH Certification Application CE Certification Application
CE Certification Application FCC Certification Application
FCC Certification Application CQC Certification Application
CQC Certification Application UL Certification Application
UL Certification Application Transformers, Inductors
Transformers, Inductors High Frequency Transformers
High Frequency Transformers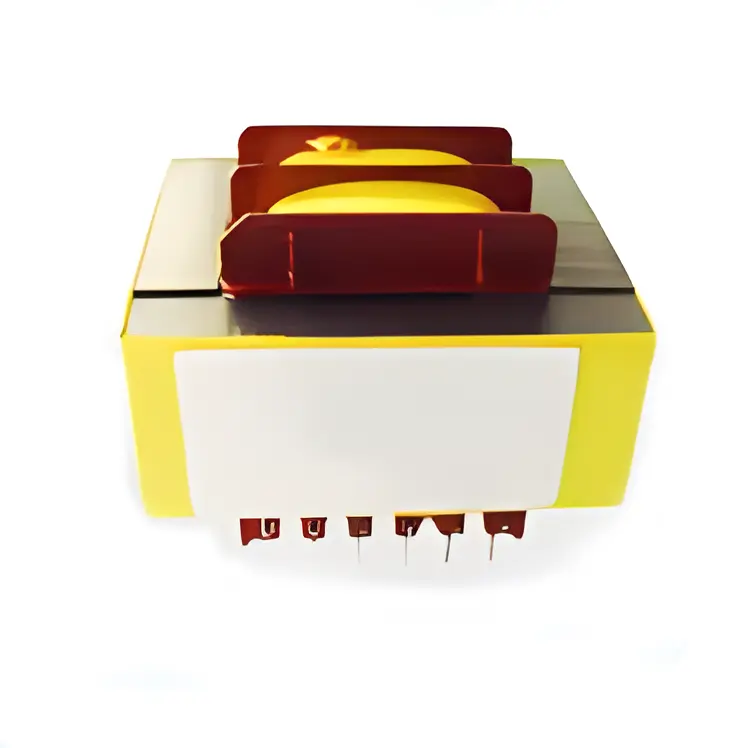 Low Frequency Transformers
Low Frequency Transformers High Power Transformers
High Power Transformers Conversion Transformers
Conversion Transformers Sealed Transformers
Sealed Transformers Ring Transformers
Ring Transformers Inductors
Inductors Wires,Cables Customized
Wires,Cables Customized Network Cables
Network Cables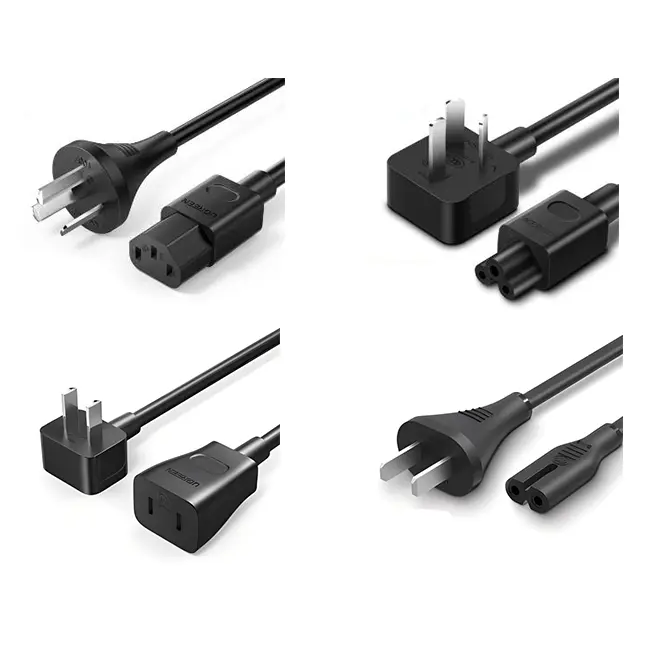 Power Cords
Power Cords Antenna Cables
Antenna Cables Coaxial Cables
Coaxial Cables Net Position Indicator
Net Position Indicator Solar AIS net position indicator
Solar AIS net position indicator Capacitors
Capacitors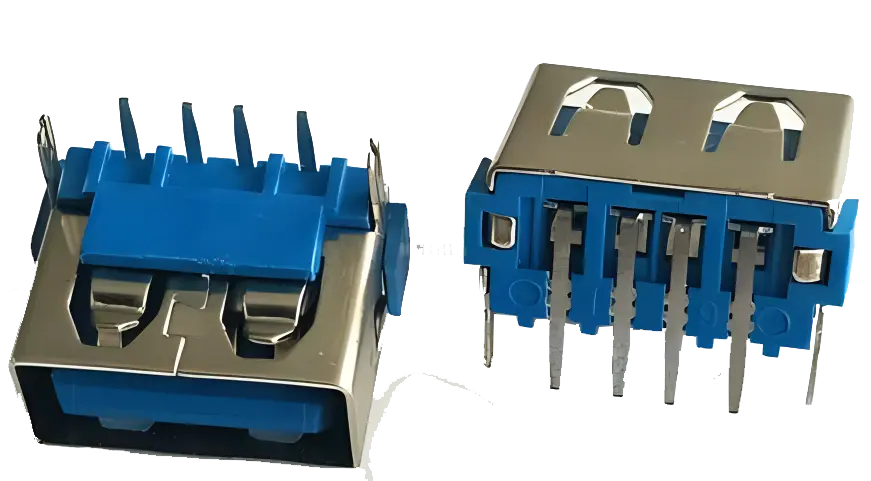 Connectors
Connectors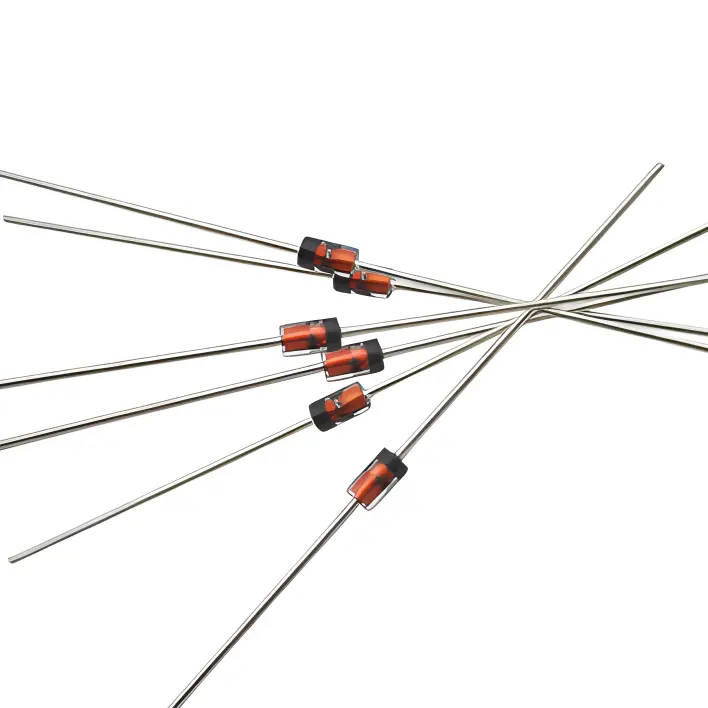 Diodes
Diodes Embedded Processors & Controllers
Embedded Processors & Controllers Digital Signal Processors (DSP/DSC)
Digital Signal Processors (DSP/DSC) Microcontrollers (MCU/MPU/SOC)
Microcontrollers (MCU/MPU/SOC) Programmable Logic Device(CPLD/FPGA)
Programmable Logic Device(CPLD/FPGA) Communication Modules/IoT
Communication Modules/IoT Resistors
Resistors Through Hole Resistors
Through Hole Resistors Resistor Networks, Arrays
Resistor Networks, Arrays Potentiometers,Variable Resistors
Potentiometers,Variable Resistors Aluminum Case,Porcelain Tube Resistance
Aluminum Case,Porcelain Tube Resistance Current Sense Resistors,Shunt Resistors
Current Sense Resistors,Shunt Resistors Switches
Switches Transistors
Transistors Power Modules
Power Modules Isolated Power Modules
Isolated Power Modules AC-DC Power Modules
AC-DC Power Modules DC-AC Module(Inverter)
DC-AC Module(Inverter) RF and Wireless
RF and WirelessCAN Bus Module: the core bridge for vehicle communication and control
CAN Bus Module: the core bridge for vehICle communication and control
In modern automotive engineering, the CAN Bus Module controller, as an advanced and reliable communication technology, plays a crucial role. CAN Bus, also known as Controller Area Network, is a bus standard specifically designed for vehicles. Its primary purpose is to address the issue of an increasing number of wires inside vehicles and to provide a foundation for efficient and reliable communication between various systems within the vehicle.
The origin and development of CAN Bus
CAN Bus technology was first proposed by the German company Bosch in 1985, which solved many problems caused by the complex wiring harness inside traditional cars. In 1993, CAN Bus was officially established as an international standard ISO-11898. With its high reliability and poweRFul error detection capabilities, it has been widely used not only in the automotive field, but also gradually expanded to many fields such as marine, avionics, mass transportation, agricultural equipment, medical equipment, and industrial control.
The working principle of CAN Bus
CAN Bus adopts serial two-wire differential transmission technology to generate differential signals through two lines, CAN High and CAN Low, to achieve data transmission. Each node Node can actively send information to the bus, and can also request specific nodes to return information. The transmission of information is not defined on nodes, but on information. Each piece of information starts with an identification subfield ID Field, and the priority of sending the information is determined by the identification value. The smaller the value, the higher the priority. This design makes the CAN Bus system have good scalability and flexibility, which can easily add or remove nodes, reducing wiring costs and maintenance complexity.
Application of CAN Bus Module in Vehicles
In a vehicle, the CAN Bus Module is the bridge between the various systems of the vehicle, responsible for transmitting data from different sensors and sending it to the corresponding control modules. The main function of CAN Bus Module is to feed back the current status information of the vehicle, such as heading, angle, speed, etc., and send control commands to the vehicle's wire-controlled chassis. It achieves precise control of the vehicle through communication with the self-driving software.
Specifically, the input of the CAN Bus Module is the control command sent by the control module, and the output is the information of the vehicle chassis, including the chassis status and detailed information. This information is transmitted to upper-layer software such as Apollo through CAN Bus drivers/canbus, and receives control commands from the upper-layer software and sends them to the vehicle's drive-by-wire chassis to control the vehicle.
Debugging and testing of CAN Bus Module
During the vehicle development process, debugging and testing of the CAN Bus Module are crucial. Apollo provides a testing tool called teleop for developers to send control commands to the vehicle's underlying layer, making it easier for developers to debug the vehicle's underlying protocols. In addition, Apollo also provides a FAKE_CAN client dedicated to debugging. It can simulate receiving fake CAN messages from the vehicle's underlying layer without installing a CAN card, helping developers debug and test.
Minintel can provide customized components according to specific customer requirements. We specialize in providing PCB prototypes and bulk assembly. Our turnkey services include PCB manufacturing, component procurement, PCB assembly prototyping, and PCB testing. At Minintel, a variety of first-class equipment and strict quality control system help us provide you with high-quality products!